«Et bilde sier mer enn tusen ord», men ikke for en datamaskin. Hvordan utlede en sammenheng i en rekke piksler? Gjenkjenning og deteksjon av objekter er én tilnærming. Neste trinn er å finne en relasjon mellom forskjellige objekter på skjermen. Dette høres ut som en enkel oppgave i både X- og Y-dimensjonene hvis vi kjenner midtpunktet eller en polygon som beskriver de enkelte objektene. Det blir litt mer komplisert når vi ønsker å spørre en datamaskin om et objekt befinner seg bak eller foran et annet. Datamaskiner sliter fortsatt med dybdeoppfatningen.
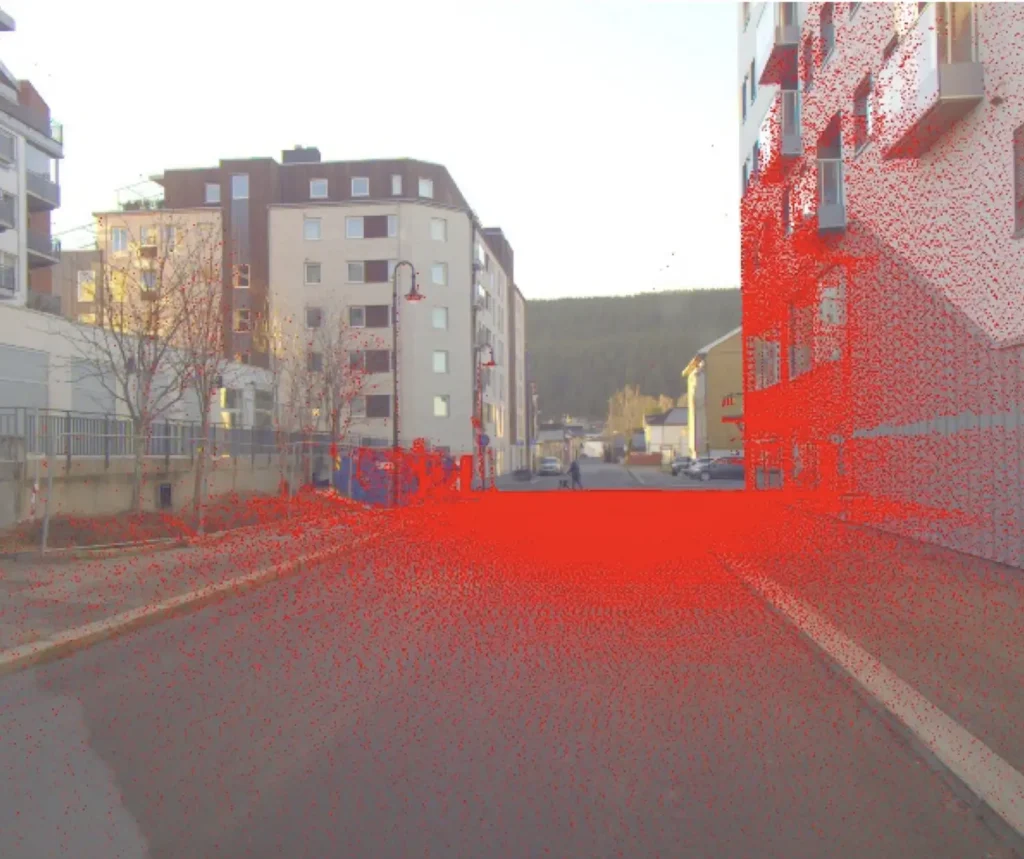
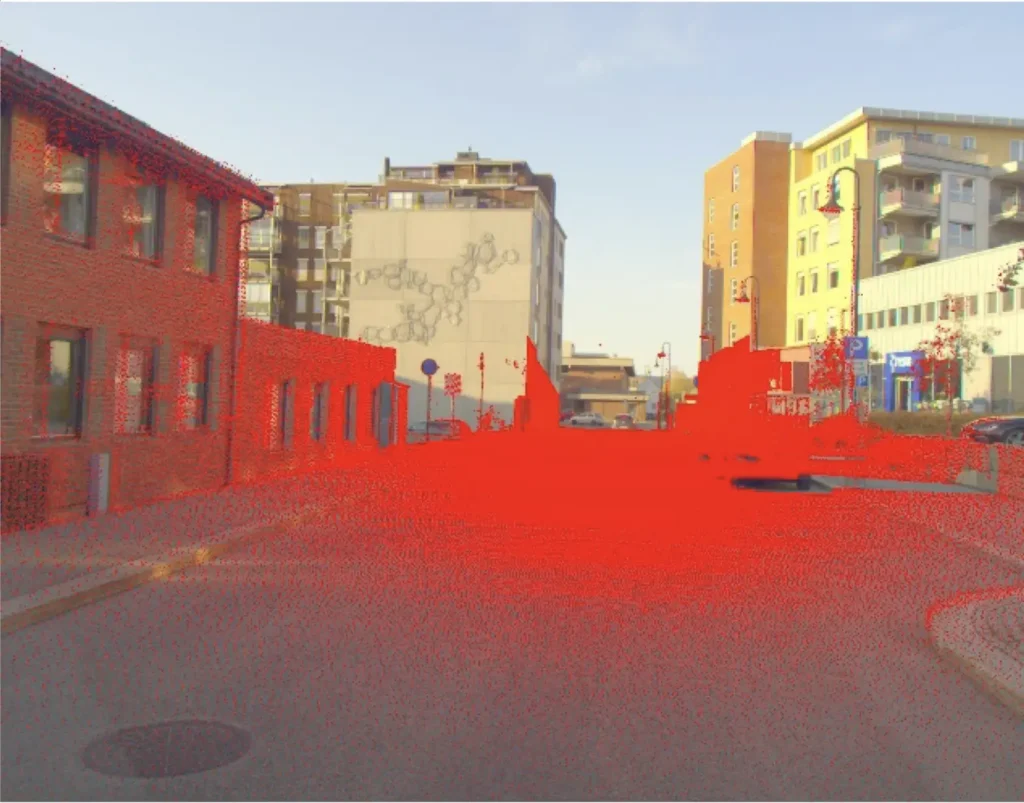
De mest avanserte dybdesystemene bruker i dag LiDAR-løsninger (se f.eks. den nyeste iPhonen), fordi det ennå ikke er mulig å estimere dybde fra et RGB- eller gråtonebilde i en skala som egner seg for kommersielle produkter. Løsningen er å kombinere et RGB-bilde med LiDAR-data. Siden de fleste standardkameraer ikke har en integrert LiDAR-sensor, må LiDAR plasseres et annet sted på en enhet eller et system, som 3D Mobile Mapping System (ViaPPS) fra ViaTech AS, noe som fører til forskjeller i fysisk plassering og orientering mellom de to sensorene.
ViaTech tilbyr løsninger for å finne korrespondanser mellom ulike sensorer som gjør det mulig å utføre datafusjon for en nedstrømsoppgave, for eksempel å finne avstander mellom objekter i RGB-bilder. ViaTech oppnår god kalibrering ved å finne samsvar mellom LiDAR-data og RGB-bilder gjennom optimalisering. For øyeblikket krever kalibreringen manuell input fra en operatør, som bare gjøres én gang og kan justeres ved behov. ViaTech arbeider imidlertid for å oppnå en helautomatisk sensorkalibrering som kan kjøres i sanntid og kompensere for avvik som kan oppstå på grunn av temperaturendringer og vibrasjoner når systemet utsettes for ulike situasjoner i det virkelige liv.
Av Boris Mocialov, ph.d. Ingeniør innen datasyn
RGB-bilde fra VPS-systemet med de tilsvarende LiDAR-punktene fra Velodyne-sensoren.